Differentiation from WLAN: Why do we need a remote 5G campus network when we could continue with WLAN as before?
- WLAN cannot be used in real applications such as Search & Rescue due to insufficient range (5G set)
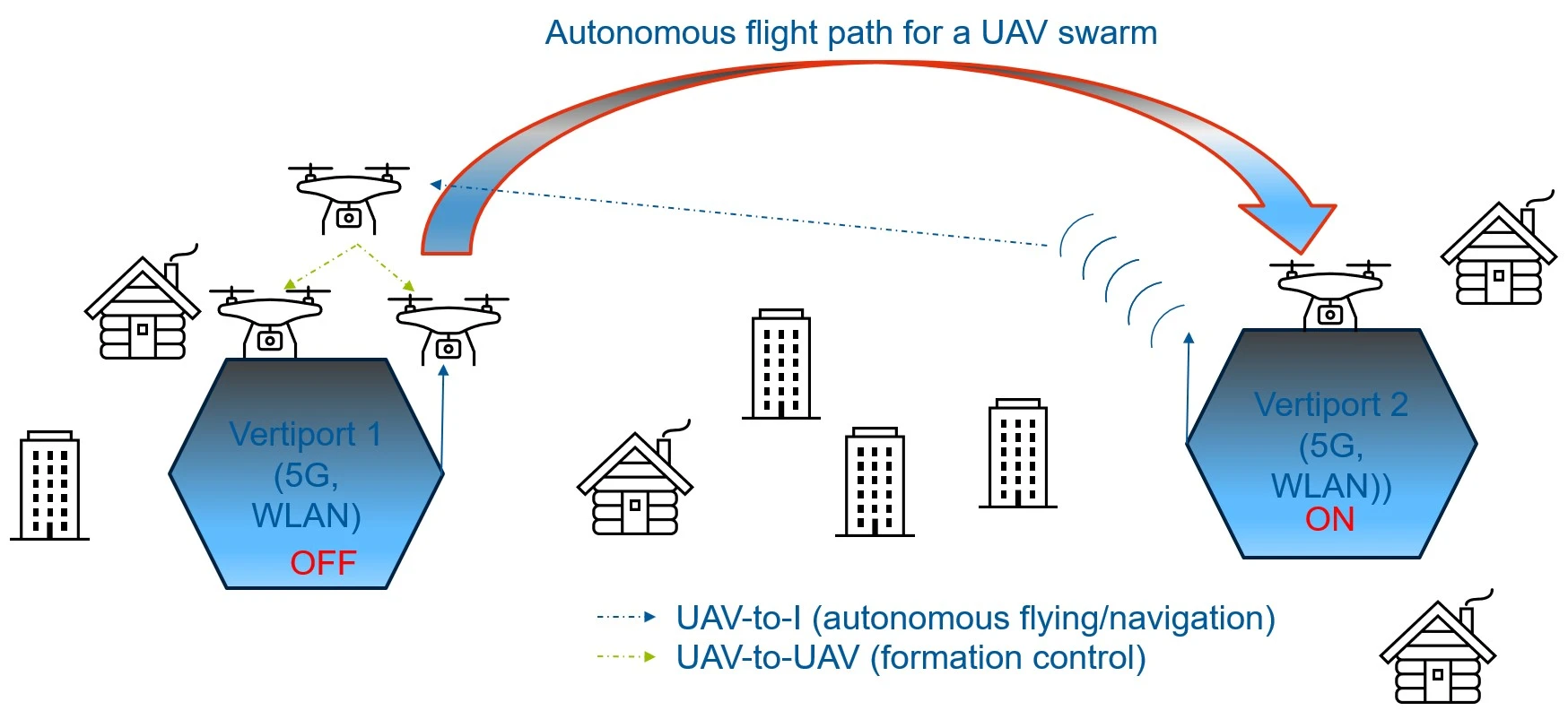
- In drone swarms, distributed navigation can improve navigation accuracy. To achieve this, however, significant communication effects (e.g. latency) in a swarm of drones must be understood and taken into account.
- In intralogistics, only 5G can be used to localise AGVs and drones. (not possible with WLAN)
Relevant research questions
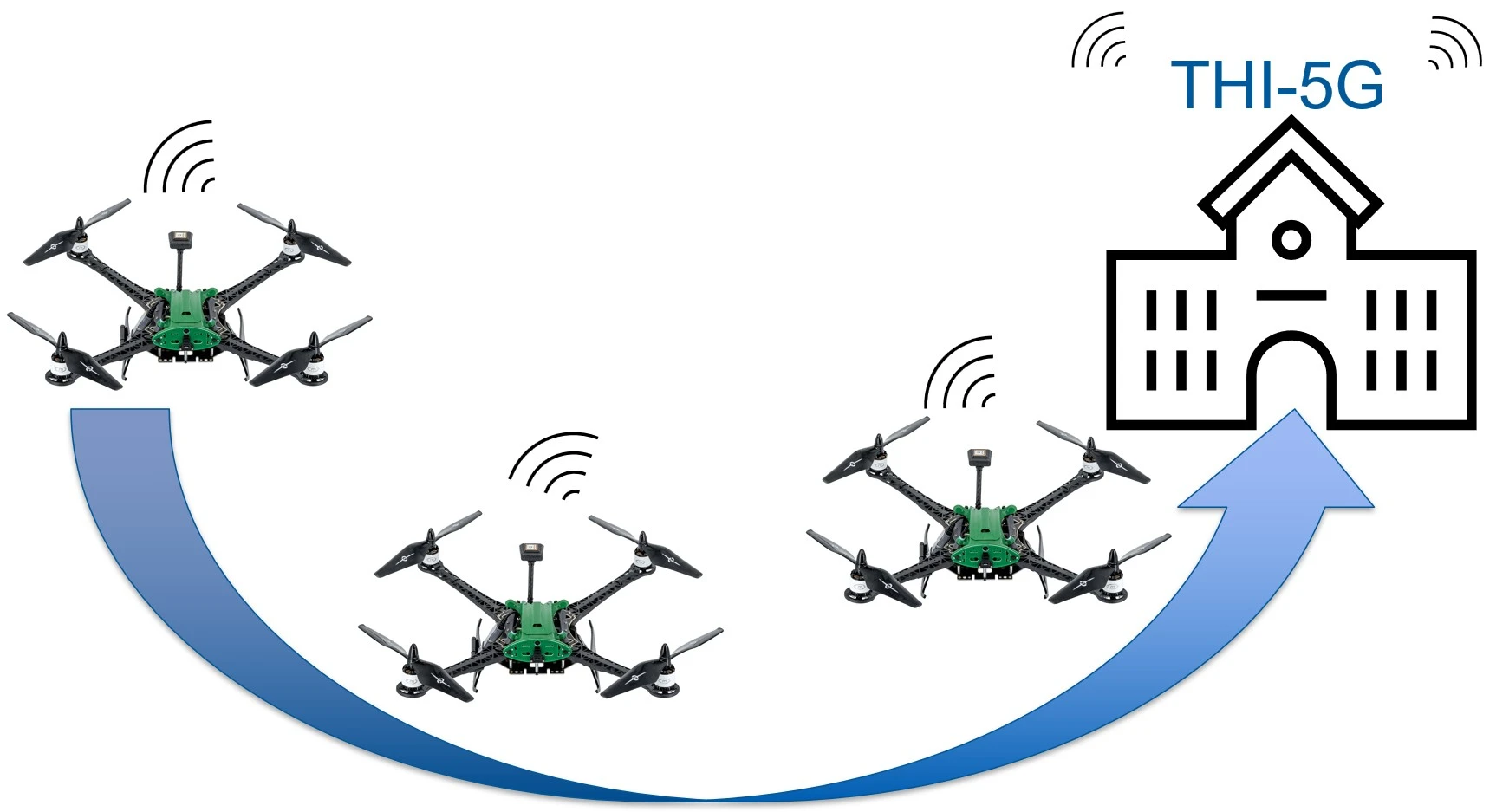
- Technology demonstrations with ‘5G Wireless Communication Technology’ both indoors and outdoors
- Maintaining robust/reliable wireless communications during the flight
- Localization and navigation of UAVs for network-based formation control
- Space-air-ground integrated network for autonomous flying
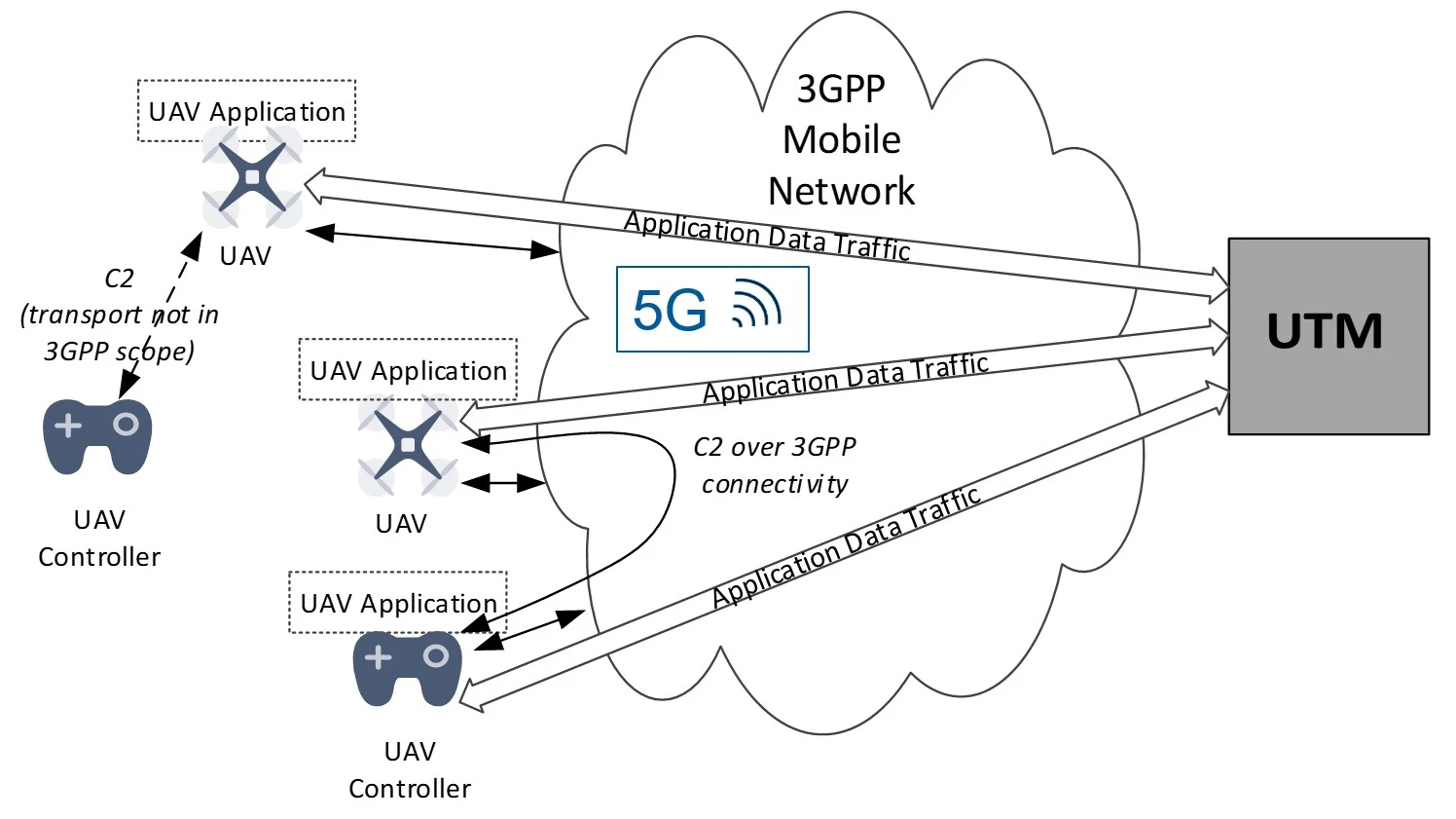
- Wireless communications with vertiports and UAV swarms