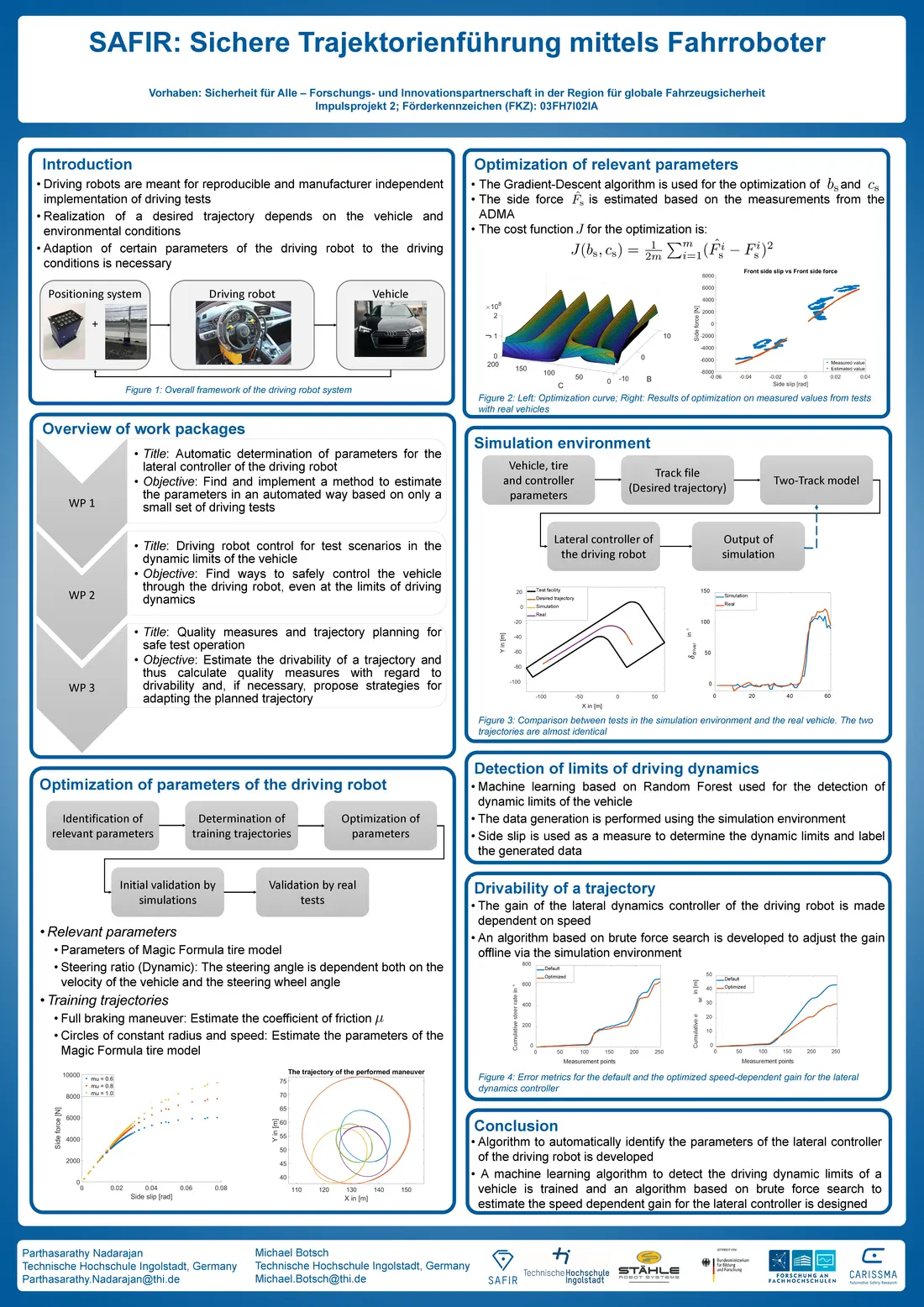
Fahrroboter werden zur reproduzierbaren und herstellerunabhängigen Durchführung von Fahrversuchen, insbesondere im Bereich der Fahrerassistenzsysteme, verwendet. Um ein gewünschtes Fahrverhalten zu realisieren, müssen Parameter in den Algorithmen eines Fahrroboters an das Fahrzeug und an die vorliegenden Umweltbedingungen angepasst werden. Ein Ziel des Forschungsvorhabens ist es, ein Verfahren zu finden und umzusetzen, welches es ermöglicht, die für die Trajektorienregelung eines Fahrroboters notwendigen Parameter schnell und automatisiert zu bestimmen.
Der Einsatz von Fahrrobotern zur Durchführung von Fahrmanövern im dynamischen Grenzbereich ist von entscheidender Bedeutung für Ausweichmanöver in sicherheitskritischen Situationen. Ein weiteres Ziel des Forschungsvorhabens ist eine Optimierung des Reglers durch Situationsadaption für die Durchführung von Manövern im fahrdynamischen Grenzbereich. Es wird eine mögliche Anpassung von Trajektorien in Echtzeit untersucht, z. B. durch die Reduzierung der Geschwindigkeit des Fahrzeugs, um die Stabilität des Fahrzeugs zu gewährleisten.