Safety for all – Innovative Research Partnership on Global Vehicle and Road Safety Systems
Kundengerechte Erprobungssystematik für pilotiertes Fahren (KEPF)
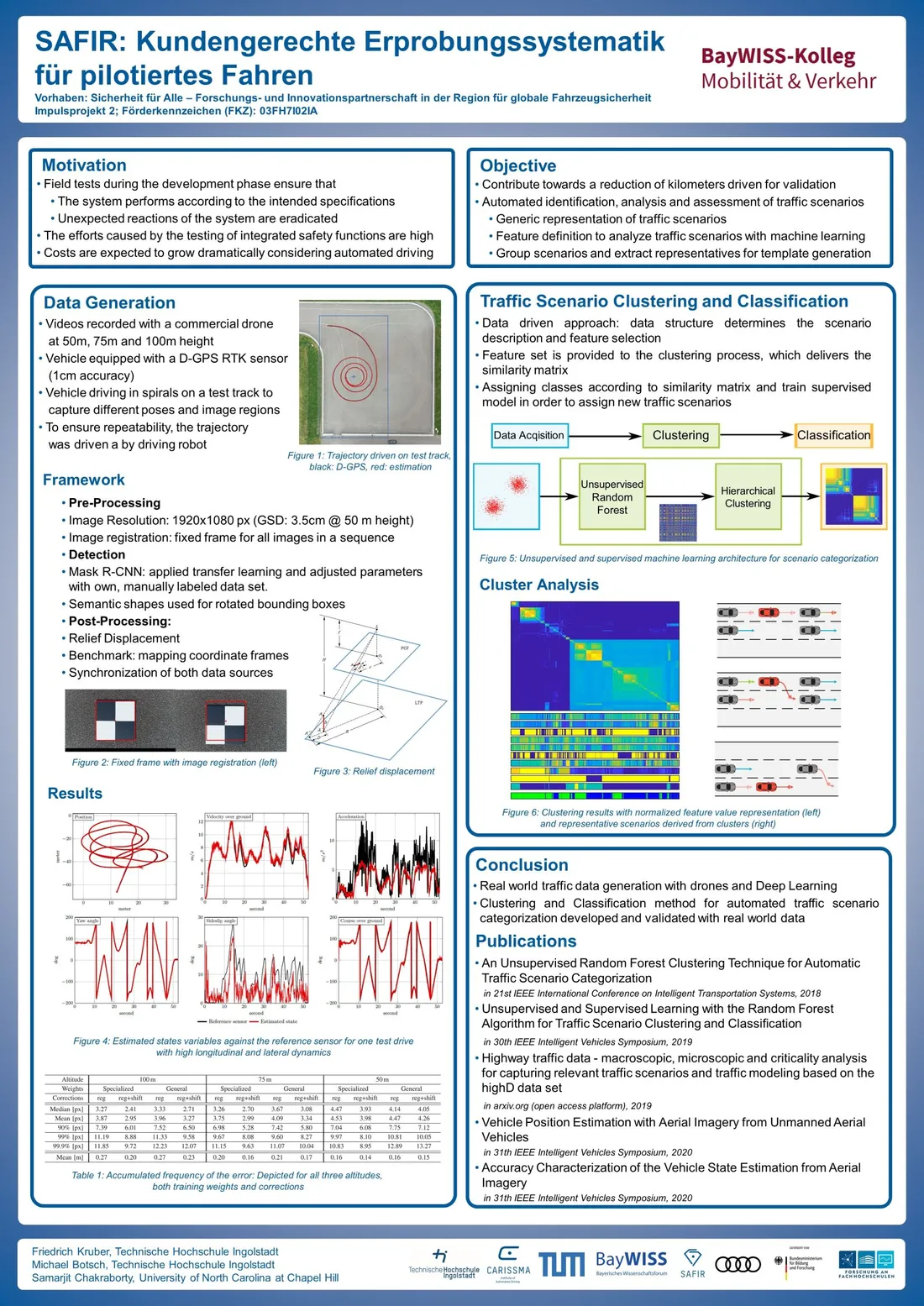
Bei der Absicherung versuchen Fahrzeughersteller durch Felderprobungen Antworten auf die Fragen „Erbringt das System tatsächlich den beabsichtigten Nutzen?“ und „Zeigt das System im Praxiseinsatz unerwartete Reaktionen?“ zu finden. Der Aufwand bei der Absicherung von integralen Fahrzeugsicherheitsfunktionen ist heute bereits sehr groß und es ist zu erwarten, dass dieser Aufwand in den kommenden Jahren angesichts der Entwicklung hin zum autonomen Fahren dramatisch wachsen wird. Insbesondere die Felderprobungen von Fahrzeugfunktionen, die in die Längs- bzw. Querdynamik eines Fahrzeugs eingreifen, sind sehr kostspielig. Daher soll in diesem Projekt ein Konzept zur Erprobungssystematik von Fahrzeugfunktionen mit autonomen Eingriffen in die Fahrdynamik erforscht werden. Dies soll einen Beitrag zur Reduktion der benötigten Anzahl an „Straßenkilometern“ liefern.
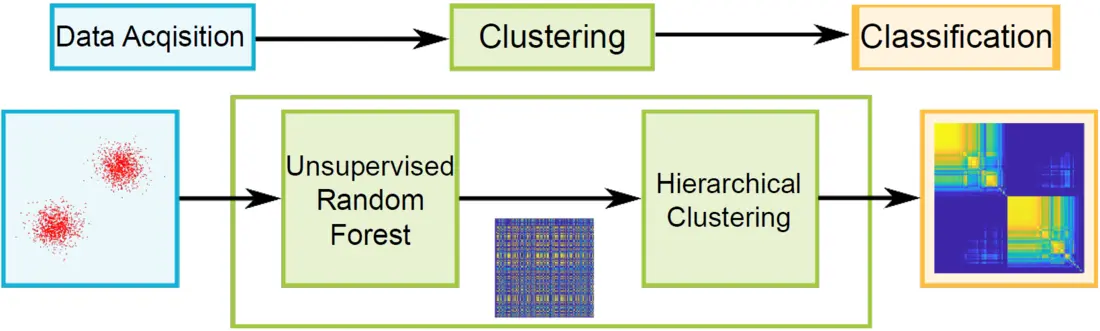
Abb. 1: Architektur aus unüberwachtem und überwachtem Lernen zur datenbasierten Kategorisierung von Verkehrsszenarien.
Zur Erreichung dieses Ziels stehen die automatisierte Identifikation, Analyse und Bewertung von Verkehrssituationen bei Fahrten auf öffentlichen Straßen im Mittelpunkt.
Dies wird anhand von Maschinenlernverfahren erreicht, welche mit definierten Parametern eine Analyse des jeweiligen Szenarios durchführen. Über Cluster-Verfahren werden sie zu repräsentativen Szenarien gruppiert: Die Cluster bilden sich aus der Kombination von ereignisbasierten Merkmalen, da die zeitliche Abfolge der Ereignisse eine entscheidende Rolle einnimmt. Anhand von Ähnlichkeitsmaßen werden die Szenarien schließlich gruppiert.
Von großer Bedeutung ist die Ableitung des quantitativen Beitrags des jeweiligen Szenarios zum gesamten Absicherungsbedarf der Funktion. Dazu sollen Simulationen durchgeführt werden und die Ergebnisse mit realen Daten aus Erprobungen abgeglichen werden. Somit lassen sich besonders relevante Situationen mit hohem Deckungsbeitrag ermitteln, welche zielgerichtet bei der Absicherung getestet werden und somit den Aufwand reduzieren. Aus diesen Situationen werden schließlich demonstratorische Testszenarien abgeleitet, die anschließend auf den CARISSMA Testgeländen reproduzierbar getestet werden können.
Neben Simulationen werden Realdaten aus Erprobungen und des regulären Straßenverkehres genutzt. Dazu wird in diesem Projekt eine Methodik zur Erfassung des Verkehrsgeschehens entwickelt. Mithilfe von unbemannten Luftfahrtsystemen wird an einer Lösung gearbeitet, welche die Erfassung von ganzen Straßenabschnitten mit vielen Verkehrsteilnehmern ermöglicht. Abbildung 2 zeigt die Umsetzung am Beispiel eines Kreisverkehrs.

Abb. 2: Verkehrsgeschehen an einem Kreisverkehr. Jedes Fahrzeug verfügt über eine eindeutige Zuordnung (rote Nummer). Auf Grundlage von maschinellen Lernverfahren können die Fahrzeuge erfasst und verfolgt werden. Daraus werden Parameter wie die Position und Geschwindigkeit ermittelt (Türkis).
Diese Art der Datenerfassung bietet diverse Vorteile: die synchrone Datenerfassung von mehreren Objekten, geringe finanzielle Anforderungen an die Hardware sowie die Mobilität des Systems. Zusätzlich lassen sich auch Signalanlagen in die Auswertung einbinden. Beispielsweise die Berücksichtigung Ampelschaltungen, um daraus weitere Rückschlüsse aus dem Verhalten der Teilnehmer zu ziehen.
Entscheidend für die Güte ist eine ausgereifte Datenverarbeitung. Die Objekterkennung erfolgt mittels maschinellem Lernverfahren. Das Verfahren nutzt das Zusammenwirken mehrerer neuraler Netze. Es ermöglicht nicht nur die Detektion von Objekten, sondern die Bestimmung derer Größe, Lage und Orientierung. Im letzten Schritt erfolgt die Verfolgung von Objekten, um Trajektorien und schließlich Verkehrsszenarien darstellen zu können. Die Güte der Zustandsschätzung wird mittels Fahrzeug-Referenzsensorik auf dem CARISSMA Freiversuchsgelände ermittelt.
Forschungspartnerschaft
Fördermittelgeber
Förderkennzeichen: 03FH7I02IA

Audi AG
Poster