End-To-End Wide Baseline Drohnenlokalisierung durch Kamerapose
Bestimmung der Kamerapose in einer dynamischen Umwelt
Herausforderungen:
- Begrenzte Genauigkeit durch dynamische und statische Merkmale.
- Beeinflussung durch Umweltbedingungen (z. B. Licht, Wetter).
- Eingeschränkte Generalisierbarkeit außerhalb des Trainingsdatensatzes.
Zielsetzung:
- Bestimmung der Drohnenposition in GPS-beschränkten Gebieten.
- Verbesserung der autonomen Navigation durch Echtzeit-Lokalisierung.
Vorgehensweise:
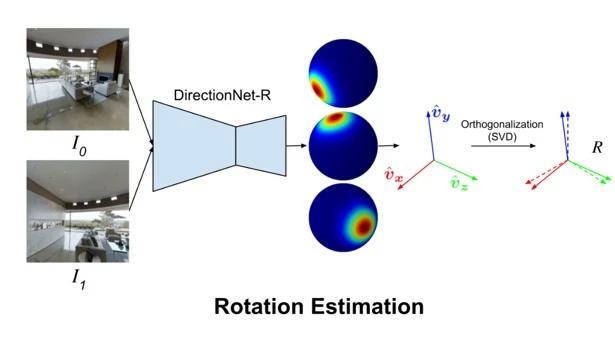
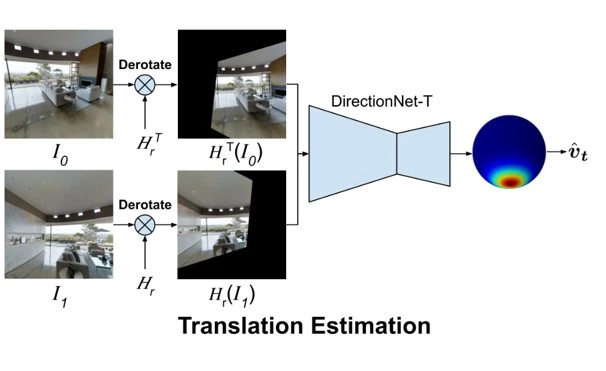
- Nutzung von Convolutional Neural Networks (CNNs) mit Transformers (Self-Attention-Mechanismen) und Graph Neural Networks (GNNs).
Technische Erweiterung
- Nutzung von Lidar- und Thermal-Kameras bei Verfügbarkeit der Datensätze.
Das End-to-End-Wide-Baseline-System ist ein Ansatz, der die Position einer Drohne direkt aus Kamerabildern mit großen Winkelunterschieden berechnet, ohne dass Zwischen Algorithmen erforderlich sind.
THI Ansprechpartner


Wissenschaftlicher Mitarbeiter
Emre Tsaliskan
Tel.: +49 841 9348-6854
Raum: K307
E-Mail: Emre.Tsaliskan@thi.de
Emre Tsaliskan
Tel.: +49 841 9348-6854
Raum: K307
E-Mail: Emre.Tsaliskan@thi.de