


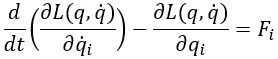
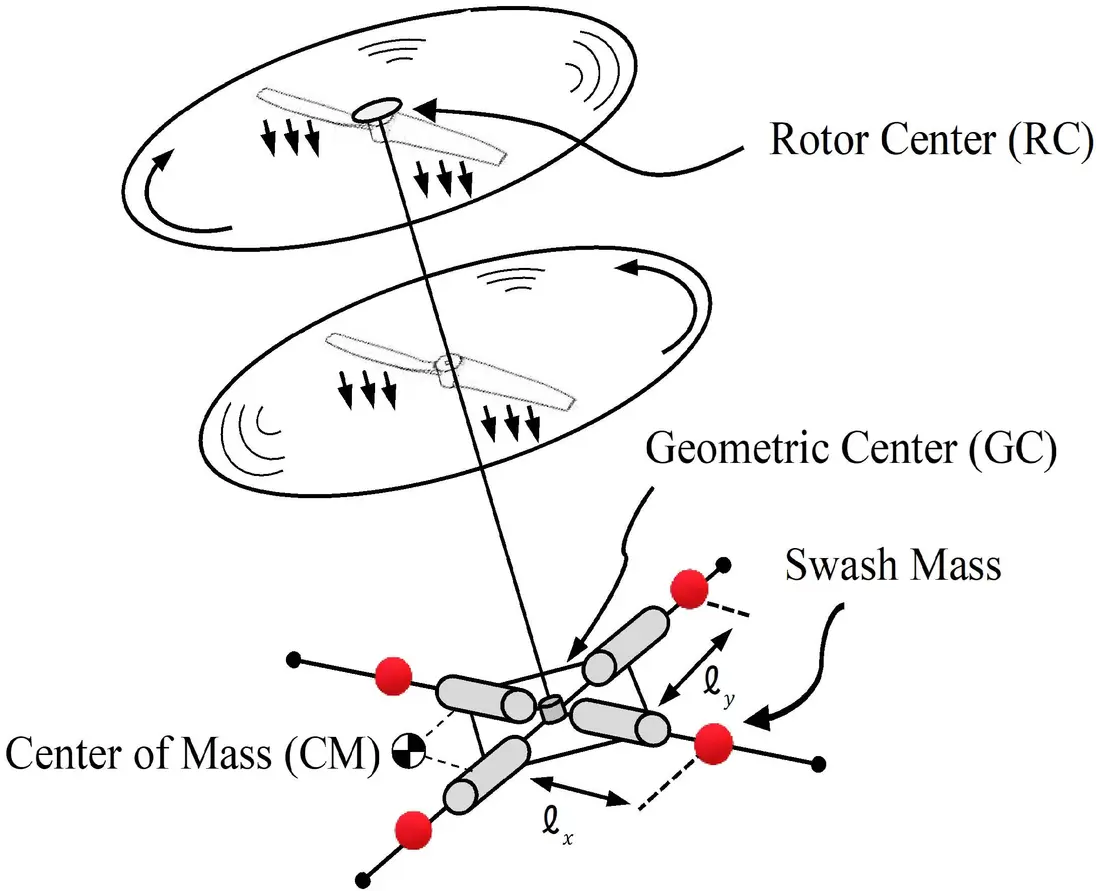
Mathematical Modeling of the Underactuated System:
Develop a comprehensive nonlinear dynamical model of the drone equipped with a moving mass system. The model will capture the effects of underactuation, aerodynamic forces, and control inputs.
Control System Design for Underactuated Dynamics:
Formulate and implement control strategies for trajectory tracking and stabilization. This includes both classical controllers (e.g., PID) and advanced model-based approaches such as nonlinear control and Reinforcement Learning (RL).
Adaptive Control Mechanisms:
Design an adaptive control framework that dynamically adjusts control parameters in real time to enhance robustness against external disturbances, modeling uncertainties, and varying payload conditions.




![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)